Dataset
Path Finding Simulation Dataset (PFSD)
-
Path Finding Simulation Dataset was generated by simulating the navigation of agents within 100 large synthetic environments. These environments were designed according to the external shapes and interior organizations of rooms and corridors generally found in contemporary architecture. Unlike SDD and nuScenes, the non-navigable spaces in these environments are significantly more complex for navigation. Each of the environments was used to simulate 500 scenes (amounting to 50,000 total scenes), where a single agent navigates between two random points within the environment using the prevalent Social Force model.
-
The scenes were sampled at 2.5 Hz and further divided into training/val/test cases with 3.2s (8 frames) of observed trajectories and 4.8s (12 frames) of future trajectories.
-
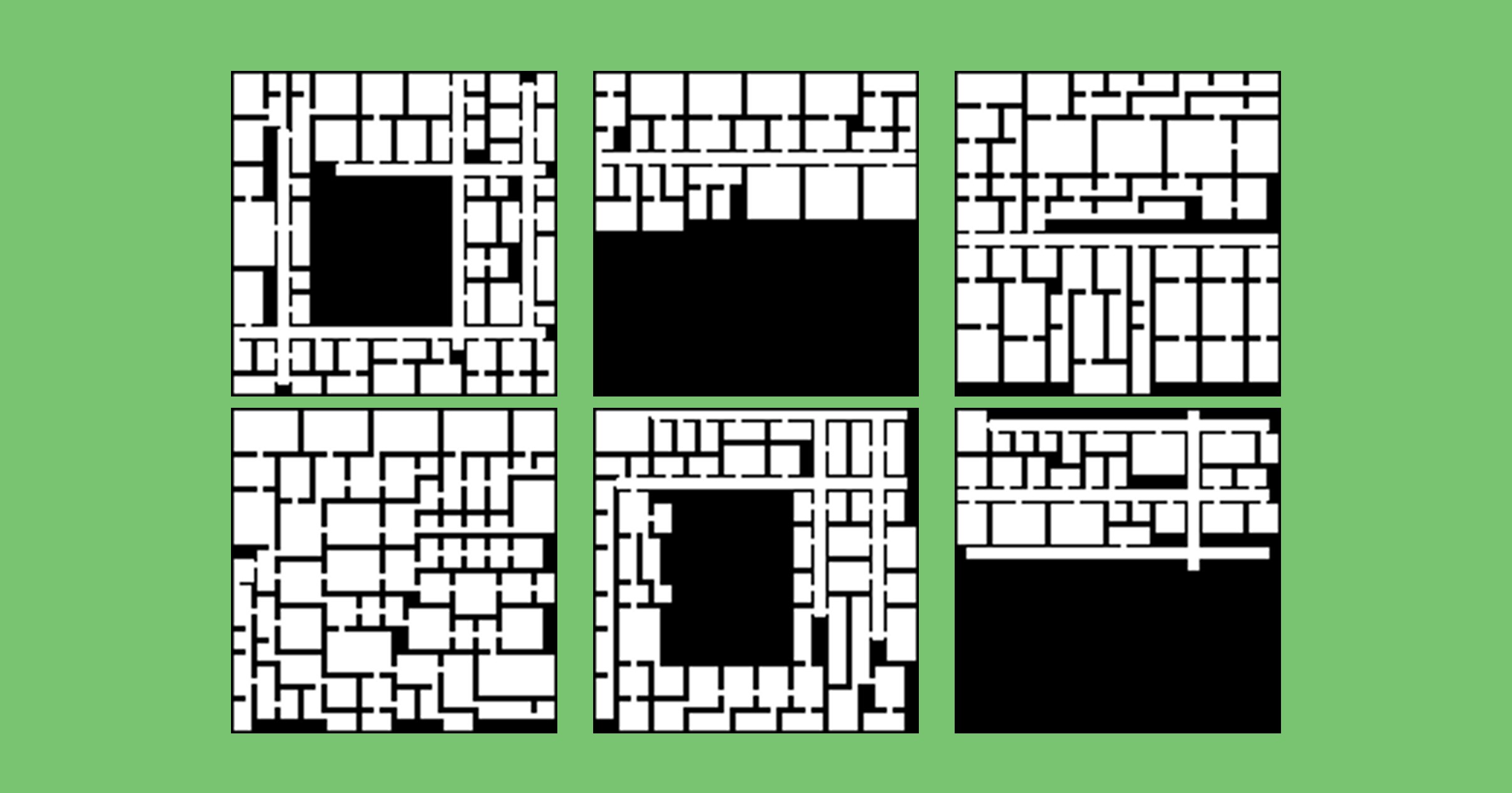
We use subset of the PFSD and make the train/val/test set with 40/2/4 different synthetic environments, respectively. It is the binary map consisting of navigable (white-colored) and non-navigable (black-colored) space of the entire environment of one scenario. An agent finds a path by moving from a room to another room using the exit between obstacles.